Nvidia Jetson Tx2 Opencv Python

Install Opencv And Tensorflow On Jetson Tx1 And Jetson Tx2 By Manivannan Murugavel Medium

Object Detection On Nvidia Jetson Tx2 By Quantum Data Driven Investor Medium

Setting Up Jetson Tx1 Tx2 For Onboard Processing With Opencv 3 And Opencv Contrib Module With Cuda Enabled By Talha Farooq Medium
Getting Started With Nvidia Jetson Tx2 By Pavel Surmenok Medium

Github Jetsonhacks Buildopencvtx2 Build And Install Opencv For The Nvidia Jetson Tx2
Jetson Tx2 Tensorflow Opencv Keras Install Hackster Io
These scripts rely on opencv finding the correct cuda version instead of setting it manually.
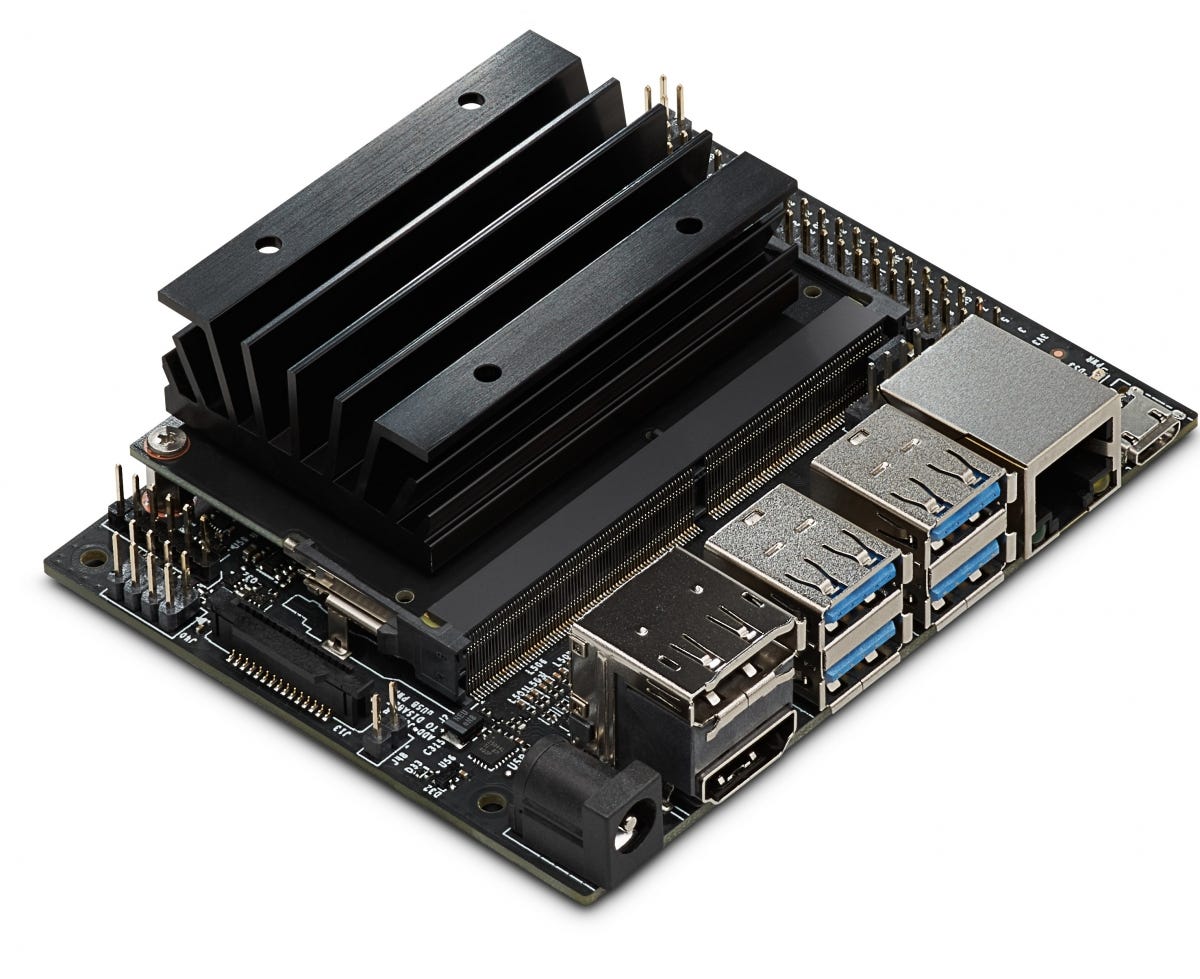
Nvidia jetson tx2 opencv python. Canny developed the canny edge detector. In this article we build a simple demonstration of a canny edge detector using opencv python and the onboard camera of the nvidia jetson tx2 development kit. A csi camera module such as the raspberry pi camera module which is compatible with the jetson nano by the way a usb webcam. Running the nvidia jetson nano demos.
Hello i m using the cv2 calcopticalflowfarneback function on my jetson tx2 with python but unfortunately i m not getting any improvement in performance after building opencv 4 1 2 from source with cuda support. We can also tell if cuda support is built. Pixel format of incoming image is unsupported by opencv videoio error. How to capture and display camera video with python on jetson tx2.
Python sample for referencing object detection model with tensorrt python 17 0 0 0 updated may 24 2019. Looking at the build information we see that the default version of opencv on the jetsons have gstreamer support but no cuda support. Background back in 1986 john f. Usually if the jetson has the onboard camera it gets dev video0 so the first usb webcam would be dev video1 and you would use cv2 videocapture 1.
Assertion gst is element element failed videoio error. The compiler includes neon support for all machines with aarch64 architecture. The canny edge is one of the image processing read more. Jetson tx2 has 35 repositories available.
With opencv 3 4 0 properly installed on the jetson tx2 we could use a python script to capture and display live video from either the jetson onboard camera a usb webcam or an ip cam. The jetson is an aarch64 machine which means that the opencv configuration variable enable neon is ignored. Just follow along this post. I want to display the camera stream directly using opencv but it seems to not be able to support my pixel format.
When using the nvidia jetson nano you have two options for input camera devices. Point 4 python and cuda and opencv. Again i ll be covering how to configure and install opencv on a jetson nano in a future tutorial. As long as i know since opencv4 all the functions are optimized and integrated by default but apparently cuda optimized functions are not implemented with python wrappers.
Can t open camera by index 1.
Http Essay Utwente Nl 80932 1 Bleijerveld2019bsc Pdf

Nvidia Jetson Nano With Csi Camera Hackster Io
Build A Hardware Based Face Recognition System For 150 With The Nvidia Jetson Nano And Python By Adam Geitgey Medium
4k Hdmi Capture Module Based On Tc358840 Jetson Tx1 Nvidia Developer Forums

Nvidia Jetson Opencv Tutorials Episode 0 Youtube
Embedded Computer Vision Which Device Should You Choose Learn Opencv

Face Detection Using Opencv And Python In 2020 Face Recognition Detection Face

Object Detection On Nvidia Jetson Tx2 Quantum
Jetson Image Processing Isp Libargus And Fastvideo Sdk By Fyodor Serzhenko Medium

X Carrier Nvidia Tegra X1 And X2 Carrier Module X Carrier Nvidia Tegra X1 And X2 Carrier Module Now In Stock

Getting Started With Ros On Jetson Nano Stereolabs

Jetpack 4 3 Released For Your Jetson Modules Latest Open Tech From Seeed Studio

Nvidia Developer News Centernvidia Developer News Center


